시험기

1 .1 기능
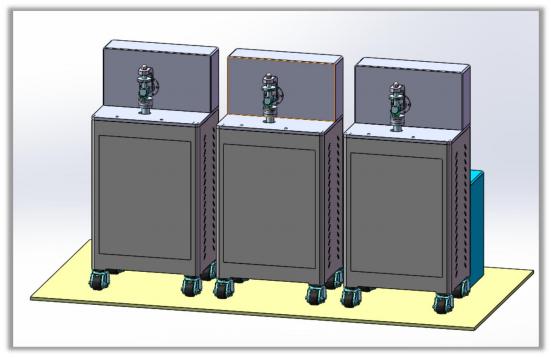
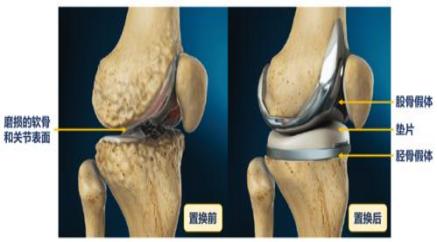
HK 3 무릎 관절 마모 시험기는 테스트 호스트, 고정 장치 및 전자 제어 부분의 세 부분으로 구성됩니다. 무릎 임플란트의 마모, 피로, 박리 및 기타 손상 과정을 시뮬레이션할 수 있으며 3개의 무릎 관절 임플란트를 동시에 테스트할 수 있습니다. 이 시험기는 시험력, 시험시간, 속도를 자동으로 제어하고 시험력과 토크를 실시간으로 측정하는 시험기입니다. 무릎 관절 보철물 및 기타 관련 의료 분야의 제조, 사용 및 연구에 적용 가능합니다.
스핀들 드라이브는 가져온 AC 서보 모터 및 제어 시스템을 채택하여 무단 속도 조절을 실현할 수 있으며 속도 범위 내에서 일정한 토크/일정한 축력 출력을 계산합니다. 테스트 힘은 나사 스프링 로딩 시스템을 사용하여 적용됩니다. 테스트 힘은 꾸준하고 안정적으로 적용되며 테스트 힘은 컴퓨터 인터페이스에서 작업자가 설정할 수 있습니다. 스핀들 속도, 회전수, 테스트 힘 및 테스트 시간과 같은 매개변수는 모두 컴퓨터에 의해 제어되며 실시간으로 테스트 데이터를 수집하고 플롯할 수 있습니다. 해당 테스트 곡선을 만들 수 있으며 테스트 데이터 또는 곡선을 마음대로 저장, 검색 및 인쇄할 수 있습니다.
완전한 관절 AP, 회전, 굴곡 외전 및 기타 움직임을 위한 다양한 구성 요소를 갖춘 3방향 서보 모터 구동 로딩 시스템, 4가지 구성 요소 힘 센서 모듈은 각각 토크 축 힘, 수평 추력 및 굴곡을 테스트합니다. 확장 중 토크 , 고정밀 로터리 엔코더, 실시간 각도 측정 및 변위를 갖춘 3방향 서보 어셈블리이며 호스트 컴퓨터 제어를 위한 효과적인 데이터 소스를 제공합니다.
각 모션 메커니즘은 3개의 스테이션과 15개의 축으로 독립적으로 제어 및 조정되어 조인트 구성요소 손상 테스트의 연삭을 완료합니다.
1.2 주요 사양
1. 중국어 작동 인터페이스를 갖춘 기기 작동 소프트웨어.
2. 소프트웨어를 실행하는 기기를 사용할 준비가 되어 있으며 특별한 소프트웨어가 필요하지 않습니다.
3. 자유도 : 각 테스트 스테이션은 굴곡/신전, 내회전/외회전, 전진/후진 운동, 3차원 모션 제어, 축력 하중을 구현할 수 있으며 각 자유도는 통제. 센서와 힘이 모두 감지됩니다. 내측/외측 방향, 내측/외측 방향으로 자유로운 이동이 가능합니다.
4. 센서의 비선형성은 전체 스케일의 0.10%보다 크지 않으며 히스테리시스는 0.10%보다 크지 않으며 반복성은 전체 스케일의 0.05%보다 크지 않습니다.
5. 변위 및 변위 센서 범위: 축 변위 100mm, 굴곡/신장 120, 내회전/외회전 20, 전방/후방 변위 15mm, 내측/측방 변위 5mm, 내반/외반.
6. 부하 용량 및 힘 센서 범위: 축 하중 3KN, 내부/외부 토크 20Nm, 전진/후진 하중 1KN.
7. 힘 및 변위 제어 정확도: 한 주기 내 힘 및 변위 진폭의 오차는 지정된 최대값을 초과해서는 안 됩니다. 최대 위상 오차는 전체 주기의 3%를 초과해서는 안 됩니다. 이 기기는 제어 가능한 각 자유도에서 ISO 14243-1 및 ISO 14243-3에 따라 테스트되었습니다. 힘 및 변위 센서의 측정된 곡선 및 편차 값.
8. 8채널 아날로그 입력 기능이 있으며 외부 데이터와 동기화할 수 있습니다.
9. 테스트 주파수: 1Hz, 정확도 0.1Hz.
10. 제어 시스템: 힘과 변위의 폐쇄 루프 자동 제어를 달성하기 위해 별도의 다중 스테이션, 다중 채널 서보 컨트롤러가 장착되어야 합니다.
11. 컨트롤러는 주기적 파형이 제어 명령으로 사용될 때 신호에 필요한 피크 값에 정확하게 도달할 수 있도록 피크 대 최저 값 제어 보상을 수행할 수 있어야 합니다.
12. 맞춤형 보행 곡선의 프로그래밍 테스트를 구현할 수 있어야 합니다. 제어 가능한 각 자유도를 단계별로 수동으로 제어할 수 있어야 합니다. 원시 데이터를 Excel 형식으로 내보낼 수 있습니다.
13. 테스트 중에 소프트웨어는 각 스테이션의 힘 및 변위 곡선과 제어 시스템을 실시간으로 반영할 수 있어야 합니다. 시스템은 수동 개입 없이 대상 곡선과 일치하도록 샘플의 동작 곡선을 자동으로 조정할 수 있어야 합니다.
14. 실시간 폐쇄 루프 제어 속도 6kHz 이하, 힘 및 변위 제어 모드를 제외하고 컨트롤러는 계산된 가변 제어 모드를 구현할 수 있어야 합니다.
15. 디지털 샘플링 주파수는 100kHz 이상이어야 하며 샘플링 방법에는 피크 값, 밸리 값, 시간 시간, 최대, 최소, 평균, 주기/로그 등이 포함되어야 합니다.
16. 듀얼 모드, 채널 피드백 제한 채널 명령 작동 모드가 있습니다.
17. 센서 여기 누락을 자체 점검하는 기능이 있습니다.
18. 온도 : 윤활매체 온도는 (37 ℃)로 유지될 수 있으며 온도 조절 시스템이 있다.
19. 윤활 매체: 조인트 표면은 윤활 매체에 담길 수 있으며 윤활 매체는 누출 없이 밀봉되어야 합니다. 누출 감시 장치가 장착되어 있습니다.
20. 테스트 구성 요소: 테스트, 워크스테이션 로드 및 모든 동작 로드에 필요한 도구가 장착되어 있습니다. 침수 워크스테이션은 장비 교정 및 문제 해결을 위한 참조 표준 샘플을 제공합니다.
21. 비상 정지 버튼: 장비에는 비상 정지 버튼이 장착되어 있어야 합니다.
22. 안전 보호: 장비에는 깨끗하고 투명한 열가소성 폴리카보네이트 소재 보호 커버가 장착되어 있어야 합니다. 안전 인터록 장치가 있습니다. 보호 커버 도어가 열리면 장비는 자동으로 테스트를 중지할 수 있어야 합니다.
1.3 근무 조건
실온에서 10℃~35℃ 범위 내;
상대 습도는 80% 이하입니다.
견고한 기초 위에 올바른 설치;
진동, 부식성 매체 및 강한 전자기장 간섭이 없는 깨끗한 환경에서;
전원 전압의 변동 범위는 정격 전압  10%를 초과해서는 안 됩니다.
10%를 초과해서는 안 됩니다.
2. 구조적 구성
테스트 기계는 스핀들 구동 시스템, 샘플 로딩 시스템 및 축력의 세 워크스테이션으로 나누어집니다. 세 워크스테이션은 동일한 스핀들 드라이브를 공유합니다. 동적 시스템 및 소프트웨어 제어 시스템.
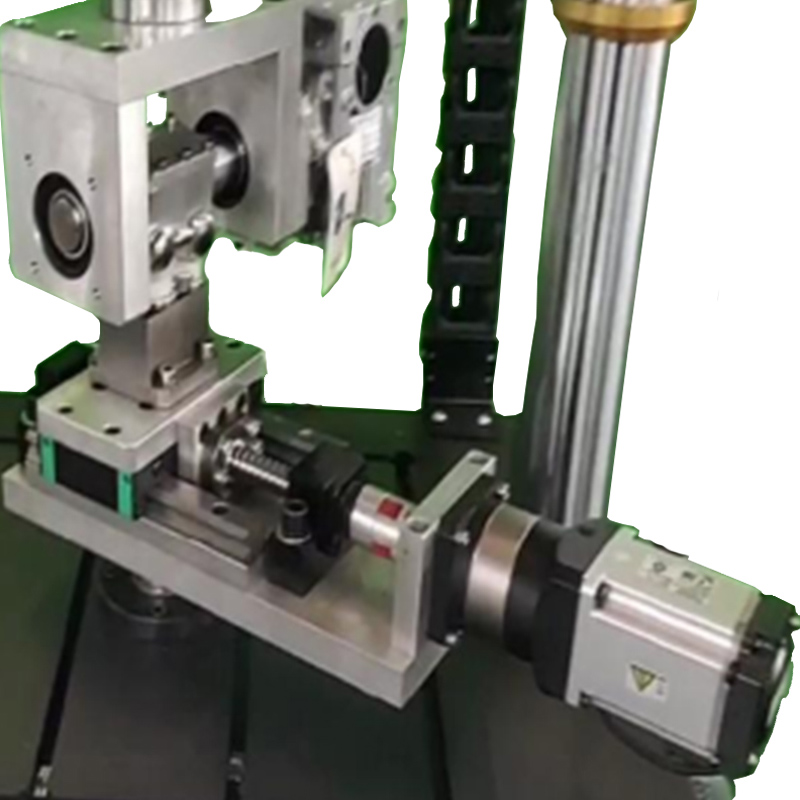
2.1 스핀들 구동 시스템
축 모터는 Panasonic AC 서보 통합 속도 제어 시스템과 모터를 사용합니다. 최대 모터 출력은 7.5Kw이며 출력은 3개의 출력 라인으로 나뉩니다.
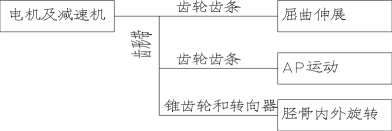
첫 번째 : 기어랙, 전자기클러치, 토크센서에 이어 대퇴골의 회전진자가 된다 전자기클러치는 전원을 켜고 끄는 역할을 담당하고, 토크센서는 토크를 측정합니다. 작동 중 토크를 측정합니다.
두 번째: 톱니 벨트와 기어 랙을 통과한 후 왼쪽 및 오른쪽으로 왕복 이동하여 샘플 AP 이동을 구동합니다.
세 번째: 톱니 벨트, 베벨 기어 및 스티어링 기어를 통해 경골의 회전 스윙으로 변환되어 샘플이 안쪽과 바깥쪽으로 회전하도록 유도합니다.
전송 경로는 아래 그림과 같습니다.
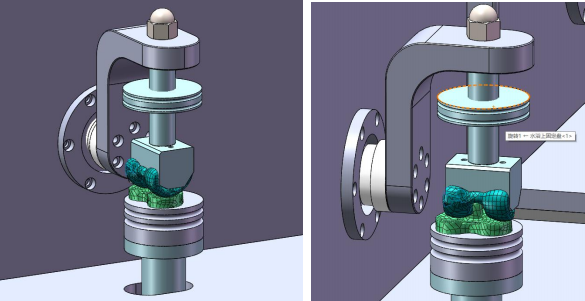
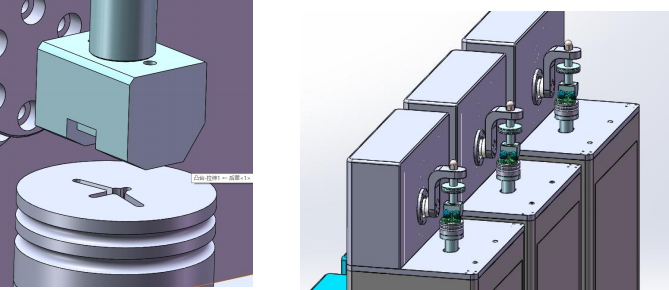
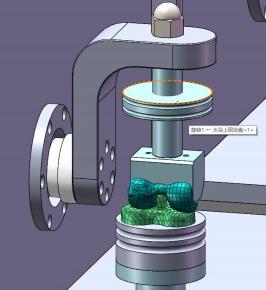
2.2 샘플 로딩 시스템
시편 로딩 시스템은 무릎 관절의 임플란트 구성 요소에 대해 인체 조건 하에서 자유로운 움직임을 시뮬레이션하여 설치 및 고정됩니다. 장착 시트, 슬라이딩 시트, 나일론 시트, 롤러, 슬라이딩 슬리브 등으로 구성됩니다.
구체적인 구현은 다음과 같습니다.
무릎 관절 마모 도구의 설치는 상대적으로 복잡합니다. 다이어그램에 따라 엄격하게 설치하십시오. 또한 해당 채널이 첨부됩니다.
전선 연결시 해당 전선번호를 이용하시기 바랍니다.
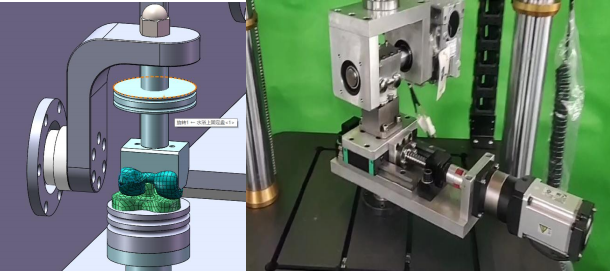
(그림에 표시된 구조는 이동 원리를 설명하기 위해서만 사용되며 실제 물체가 우선합니다.)
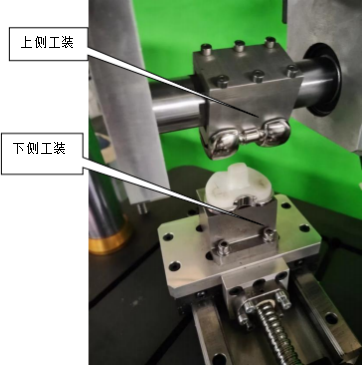

( 그림에 표시된 구조는 이동 원리를 설명하기 위한 용도로만 사용되며 실제 물체가 우선합니다.)
테스트 요구 사항을 충족하려면 샘플에 따라 상부 및 하부 툴링을 다시 처리해야 합니다. (제품 사이즈별로 세부 내용이 다름)

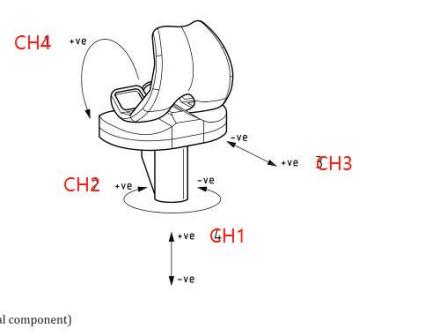
6. 채널 선택 및 관련 조정
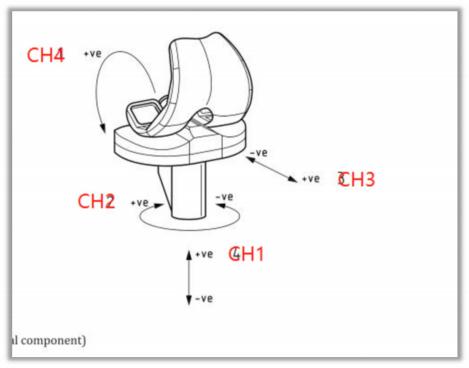
위 그림과 결합하여 채널을 확인하여 어떤 채널이 작동하는지 확인하세요. ISO 14243.3을 실행할 때 1-4 통로를 선택하세요. 채널 5는 후속 업그레이드를 위한 확장 채널입니다. 다른 단일 축 또는 이중 축 실험의 경우 해당 채널을 선택하십시오.
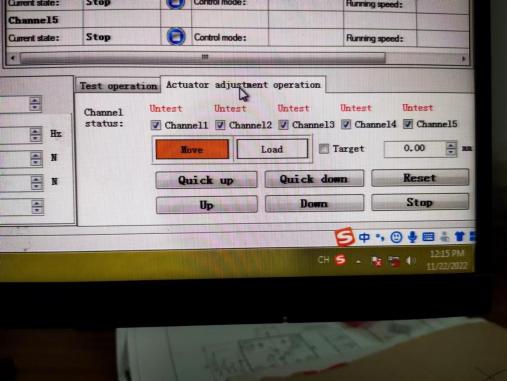
Quick up/up = 빠른 로딩/로딩
빠른 다운/다운 = 빠른 다운/다운
7. ISO 14243.3에 따라 그림과 같이 제어 파형을 가져와야 합니다.
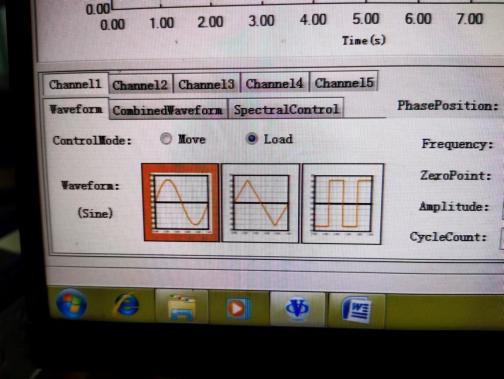
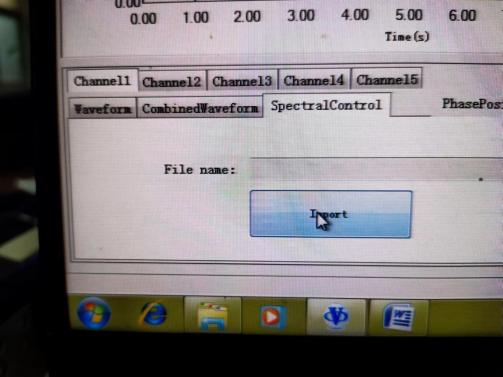
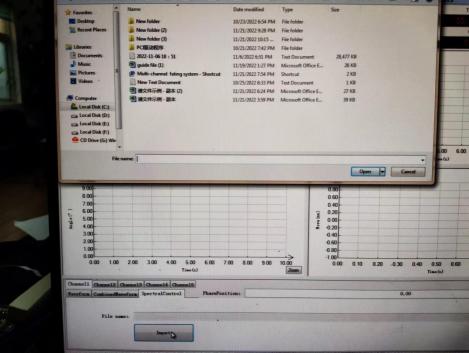
공장 사전 설정 파형을 선택합니다. 새로운 파형이나 동작을 설정해야 하는 경우 이 파일에서 설정할 수 있습니다. 수정하여 다른 이름으로 저장하세요.
각 채널에 대한 자세한 조정은 단일 채널 소프트웨어 설명서를 참조하세요.
8. 보호 정보:
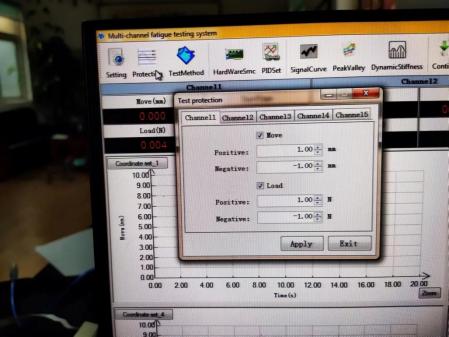
시작을 클릭한 후 실험이 이동하지 않거나 실행할 수 없습니다. 보호 옵션에 허용 범위를 벗어나 설정된 매개변수가 있는지 확인하세요.
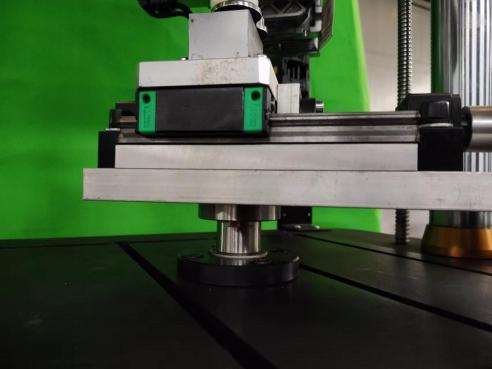
2.3 축력 하중 시스템
이 기계는 스프링 로딩 구조를 채택합니다. 로딩 메커니즘은 원호 톱니 벨트, 동기 풀리 및 정밀 볼 스크류 쌍을 통해 전달되고 정밀 선형 모션 가이드 레일에 의해 안내되어 힘 적용 시트를 구동하는 스테퍼 모터에 의해 구동됩니다. 힘을 가하는 시트는 스프링이 압축된 후 슬라이딩 플랫폼에 힘을 가하는 스프링 장착 메커니즘으로 고정됩니다. 롤러 시편의 마찰면 사이에 시험력이 형성됩니다. 모터를 제어하여 포스 시트를 구동하여 공간 내에서 전진 및 후진하도록 함으로써, 즉 시험력의 적용 및 크기를 제어할 수 있습니다. 힘 적용 시트 평면에 하중 센서가 설치됩니다. 힘 신호를 수집하세요. 선형 모션 베어링 가이드는 테스트 힘의 적용과 안정성을 보장합니다. 스프링 로딩 부분 쉽게 싣고 내릴 수 있습니다.
테스트 힘이 로드되기 시작하면 센서는 미리 설정된 압력을 마이크로컴퓨터 제어 시스템에 입력하고 마이크로컴퓨터는 시스템 압력이 미리 설정된 압력과 균형을 이룰 때까지 모터를 역방향으로 제어합니다.
2.4 부하 흡수 시스템
침지액 상자, 히터, 온도 센서, 연동 펌프, 실리콘 튜브 등의
고객은 샘플의 실제 크기에 따라 원통형 끝 표면에 위치 지정 구멍을 가공할 수 있으며 클램핑 각도는 조정 가능합니다. 각도를 조정한 후 왼쪽 위치 슬라이더를 잠급니다.



2.5 소프트웨어 제어 시스템
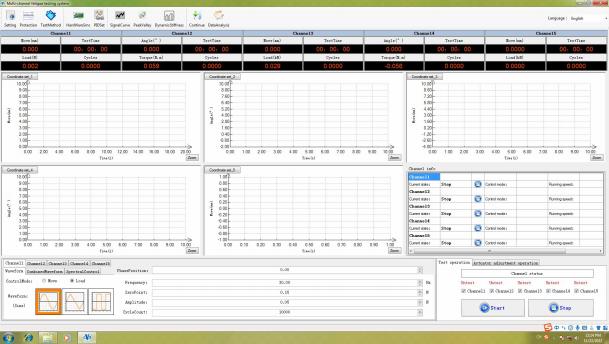
제어 시스템은 제어 기계에 설치되고 통신 케이블을 통해 테스트 호스트에 연결됩니다. 소프트웨어 운영 환경은 WINDOWS XP입니다. 제어 소프트웨어는 시스템 시작 및 정지, 작동 속도, 로딩 힘, 침지 액체 온도를 제어하고 축력, 토크, 온도, 테스트 시간과 같은 시스템 작동 데이터를 수집하기 위한 지침을 보내는 그래픽 대화형 작동 인터페이스입니다. , 테스트 중 등. 계산 및 처리 후 테스트 힘-시간, 토크-시간 및 기타 데이터 곡선이 차트 형태로 출력됩니다.
위 그림과 함께 채널을 확인하여 어떤 채널이 작동하는지 확인하세요. ISO 14243.3을 실행할 때 1~4개의 채널을 선택하고, 5 t 채널은 후속 업그레이드를 위한 확장 채널입니다. 다른 단일 축 또는 이중 축 실험의 경우 해당 채널을 선택하십시오.
Quick up/up = 빠른 로딩/로딩
빠른 다운/다운 = 빠른 제거/제거
7. ISO 14243.3에 따라 그림과 같이 제어 파형을 가져와야 합니다.
공장에서 미리 만들어진 파형을 선택합니다. 새로운 파형이나 동작을 설정해야 하는 경우 이 파일에서 수정할 수 있습니다. 다른 이름으로 저장하세요.
각 채널에 대한 자세한 조정은 단일 채널 소프트웨어 설명서를 참조하세요.
8. 보호 정보:
시작을 클릭한 후 실험이 이동하지 않거나 실행할 수 없습니다. 보호 옵션에 허용 범위를 벗어나 설정된 매개변수가 있는지 확인하세요.

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese